
探维科技是一家提供图像融合的固态激光雷达设备和三维环境感知解决方案的人工智能公司。凭借高性能、低成本、车规级、易量产的车载激光雷达,为L3~L4自动驾驶和工业AGV等领域提供优秀解决方案
激光雷达上车是刚需吗?2022年9月20日,由盖世汽车主办的2022第二届商用车自动驾驶大会上,探维科技CMO王雨晴指出,车规量产征程尚远,极致平衡的终极答案仍待探索,但融合一定是必然路径。摄像头、毫米波雷达、激光雷达几种不同传感器都有各自的特点和优势,如果缺少激光雷达,就会存在无法识别逆行车辆,白色车厢,应对弱光环境等等问题,这些都会造成交通隐患。

探维科技CMO王雨晴
以下为演讲内容整理:
关于探维科技
探维科技成立于2017年,核心团队起源于清华大学精仪系国家重点实验室,从2008年开始从事激光雷达方向的技术研发,总部和研发中心位于北京,在成都设有电子研发中心,2021年下半年在苏州落地了车规级产线,今年内将完成3个乘用车客户的量产项目定点。
为实现车规级的稳定性,探维科技基于全自研的ALS技术平台打造高性能、低成本、易量产的车规级固态激光雷达,并率先完成量产和交付。同时探维科技开发了行业内唯一的硬件级图像前融合产品Tanway Fusion,解决了激光雷达的兼容性、可靠性以及适应性问题,开启激光雷达3.0时代。
苏州量产基地于2021年下半年落地,2021年Q4已经正式将产线投入使用,产线情况是占地3000平米组装标定车间,生产和标定都实现了全自动化,目前设计的年产能是20万台,将在今年拿到IATF16949的质量体系认证。
我们从2008年在实验室中开始了固态激光雷达以及图像前融合的技术积累,并于2017年走出实验室开始探维科技的创业项目,此后几乎每年都会推出全新的激光雷达产品,并在市场上有一定的突破,同时也积累了优秀的商用车自动驾驶客户。今年我们从商用车逐步走向乘用车,推出了针对前装量产的固态激光雷达的产品,车规产线二期正在建设中,今年将正式实现量产。
商用车自动驾驶发展趋势
接下来正式进入今天商用车的主题,首先从马斯克与多传感器融合方案的纠缠开始。
2018年2月7号在特斯拉的财报电话会上,马斯克表示无人车应该丢掉激光雷达这个拐杖,次年4月23号,马斯克在特斯拉自动驾驶日上语出惊人,表示任何使用激光雷达的自动驾驶公司都注定失败。2021年5月20号,又有网友拍到了特斯拉的新车正在做激光雷达的测试。关于毫米波雷达,2021年5月特斯拉自动驾驶方案中可以看到没有了毫米波雷达的身影,而前不久特斯拉又向FCC联盟委员会提交了他们新方案,其中可以看到特斯拉不仅没有放弃毫米波雷达,反而亲自下场做了自己的毫米波雷达产品。
其实马斯克并非对某个传感器有着自己特殊的喜恶,而是在意两个点,一是单个传感器的安全性和成本,二是多传感器融合的复杂程度。通过马斯克的诉求和观点,我们也能看到整个商用车自动化发展的趋势。
首先是融资趋势,商用车融资市场调研显示,2013年-2018年市场的融资金额为4.27亿,2019年-2021年融资金额达到173.7亿,其中干线物流、港口、矿区是热度最高的三大场景。
其次是市场趋势,从研发走向大规模的量产的过程中,整个供应链的把控和产品成本的把控是非常关键的因素。
在感知趋势方面,商用车车身大、场景多、盲区多的特殊情况,对于多传感器的数量及融合提出了更高要求。
从商用车的发展趋势能够提炼出他们对于传感器感知系统的痛点,重点分成三块:
首先是规模化成本,随着落地的规模越来越大,必然会对成本提出更大的挑战。
定制化需求,商用车自动驾驶不同于乘用车,涉及干线物流、港口、矿山等场景的差异化需求,因此对于感知系统的定制化也提出了非常高的要求。
前端化感知方面,由于商用车车身大,传感器的数量又非常多,对于融合感知提出了更高的要求。
所有痛点都能总结为一个词——安全,只有保证整个感知系统的安全,才能保证整个商用车自动驾驶系统的安全,进而保证整个场景运行中人身以及环境的安全。
激光雷达的发展与现状
我们再介绍一下激光雷达的发展历程。1960年成功研制出世界上第一台激光器,2005-2007年车载激光雷达首次亮相,2013-2015年自动驾驶的热潮也让机械式激光雷达进入媒体视野,正式开启了以机械旋转式雷达为代表的激光雷达的1.0时代。
2016-2018年,视觉与激光雷达孰轻孰重的争论随着特斯拉频发的事故终结。从2019年开始,车企纷纷入局,搭载混合固态激光雷达的量产车型开始上市,激光雷达公司也都在推出混合固态激光雷达产品,混合固态激光雷达为主的激光雷达2.0时代正式来临。
无论是车企还是自动驾驶公司,针对如何把激光雷达用好、如何把激光雷达和感知系统融合同步好,一直是在行业内争论非常大的事情。我们相信未来激光雷达的3.0时代将来临,且3.0时代一定是融合的时代。
图片来源:探维科技
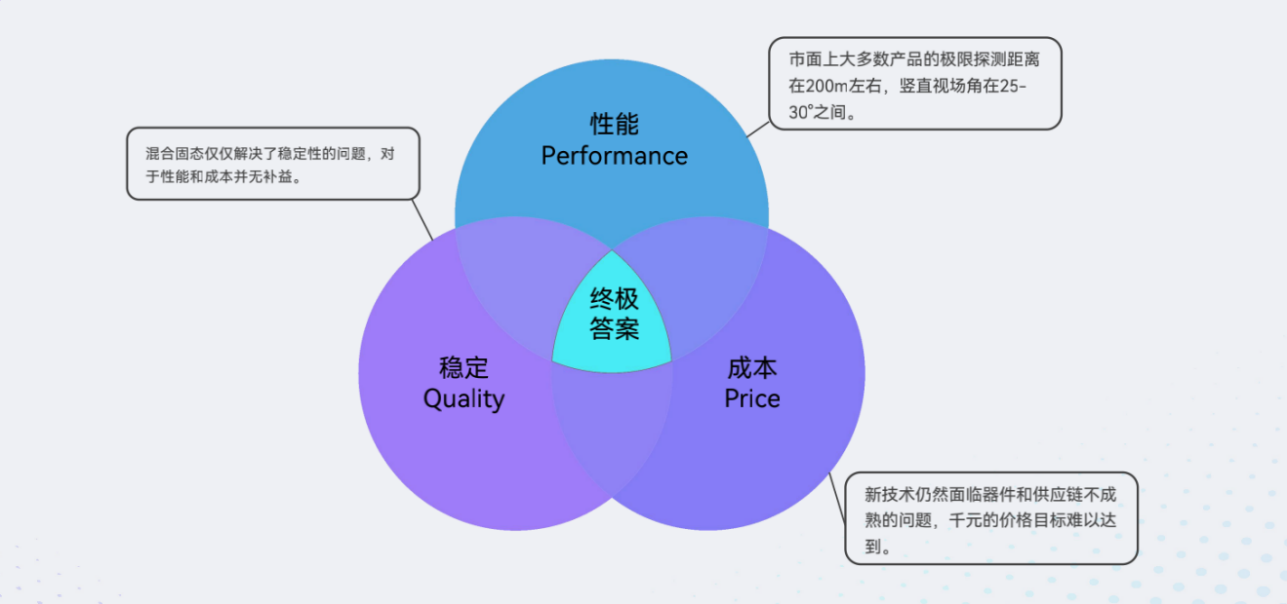
上图是激光雷达的“不可能三角”。市场上对激光雷达的要求永远是性能、稳定性和成本,三个同时达到才能将其称为终极答案,然而这三点是非常矛盾的三点。
性能方面,市面上激光雷达的探测距离普遍在200米左右,在一些高速场景下则需要更远的探测距离。成本方面,激光雷达仍是一个较新的行业,新器件和新技术的成本需要逐步去优化,千元的价格目标还是很难达到。可靠性方面,这个问题虽然已经被固态激光雷达解决了,但是对于性能跟成本还是于事无补。
大家会有疑问,激光雷达上车到底是不是割韭菜?我们的回答是,车规量产征程尚远,极致平衡的终极答案仍待探索。

图片来源:探维科技
激光雷达是不可或缺的,这也是大家的共识。摄像头、毫米波雷达和激光雷达每个传感器都有自己的特点和优势,缺少激光雷达容易导致无法识别异形车辆、无法识别白色大货车、无法应对弱光环境等风险。激光雷达无疑是必要的,未来也将向着融合前进,应考虑的问题是怎么把系统用好。
据我们了解,现在市面上绝大多数的融合方案还是后融合。后融合顾名思义就是先感知再融合,传感器各自感知到环境后进行数据处理,再把结构化的数据做融合,这里面就会出现一些问题,例如融合信息量少,计算精度低且依赖于各个传感器的性能,容易出现误检漏检的风险。现在有少量的算法能力很强的公司做前融合,即先融合再感知,同时这也对整个传感器的标定同步提出了更高的要求,前融合一直是大家需要攻克的难题。
我们应对融合难点的解决方案就是硬件级图像前融合。我们直接把图像的处理芯片装到激光雷达产品中,同步在固态发射和接收系统中接收环境光和激光回波,通过图像快门和激光触发,输出时间同源的数据。
Tanway Fusion:面向车载的硬件级前融合系统

图片来源:探维科技
我们推出的产品是一个64线激光雷达,探测距离200米,分辨率0.16°×0.32°,且空间同步精度为100米内3厘米的精度,时间同步是微秒级的同步精度,帮助客户解决了图像与激光雷达的同步和融合问题,输出的就是点点对应的数据信号。
总结一下我们融合系统的特点,首先,从系统层面上解决了感知系统的安全性和硬件成本的矛盾。在较远的距离探测车辆和行人,如果是128线激光雷达探测到的车大概是有几十个点,探测到的人十几个点,通过感知算法识别高精度的车辆和行人成本也相当高。而64线激光雷达配合图像信号非常容易感知到数据,且具有可靠的激光数据,此外64线的架构成本也相当低。
从算法层面来看,我们的融合系统也有较强的环境适应性,能适应弱光照等对激光雷达不太友好的环境情况,同时也有高精度的检测感知模型。
探维车规级与工规级产品
再介绍一下底层的核心的技术。基于阵列化扫描的激光雷达平台,全线产品分成四大部分。首先采用单轴扫描,在一维方向上做白扫,扫描模式简单,运动部件非常少,所以失效模式很低,初步稳定性也能得到保证。其次通过阵列化实现整机高度集成化,能够快速缩小体积,提升性能和线数。另外我们通过光学方案优化,对激光光源进行整形,输出的是非常高效的量产方案,使用少量的激光器就能实现高线数。此外我们采用自研的算法和芯片,因此具有极低的硬件成本,且不依赖于国外核心的元器件。
基于ALS技术平台,根据汽车用户的不同需求,我们打磨出了两款针对不同汽车用户的前装激光雷达产品。Duetto是一款130线,具有超高性价比前装激光雷达,有ROI加密区域,单光子器件可以极大提升极限探测距离,10%能达到180米。
Scope-V是192线雷达,具有全域高分辨率,更能适应高等级的自动驾驶和复杂的场景。目前这两款产品已经有各自的量产项目、定点项目,今年已开始陆续交付。

图片来源:探维科技
工规级产品方面,经过3-4版迭代,我们有16线、32线的系列产品,应用于港口等低速领域,性价比颇优且体积非常小。另一个系列是64线到192线的产品,目前已经应用于许多商用车场景和城市道路的车路协同。
商用车是我们深耕且重视的领域,从2021年起便积累了优秀的干线物流自动驾驶公司客户,192线高线数激光雷达作为主雷达,在干线物流的车上着重于前向的感知和探测。针对港口、矿山和其他复杂场景,我们也做了很多算法的优化。除了商用车,我们在低速智驾、车路协同上都有突破。以低速智驾为例,我们在清扫、物流配送、Robotaxi上面都已有产品落地。现在无论是城市道路的车路协同还是高速场景,我们都有批量的出货应用,同时也已经拿到了乘用车的定点,静等官宣。
(以上内容来自探维科技CMO王雨晴于2022年9月20日由盖世汽车主办的2022第二届商用车自动驾驶大会发表的《开启激光雷达3.0时代:硬件级图像前融合赋能商用车》主题演讲。)

